









The UNEXMIN team has come back from a trip to the flooded Kaatiala mine site in Finland excited after the first field trials with its UX-1 robot proved a success.
The two-week trial ended on June 22, with the first week involving dry and shallow water trials of the robot followed, in the second week, by deeper trials in the northern part of the Kaatiala lake where the entrances to the underground flooded workings are found.
UNEXMIN is an EU-funded project that is developing a novel robotic system, primarily for the autonomous exploration and mapping of Europe’s flooded mines. The Robotic Explorer platform, made by three robots – UX-1a, UX-1b and UX-1c – will use non-invasive methods for autonomous 3D mine mapping for gathering valuable geological, mineralogical and spatial information. This could possibly open up new exploration scenarios so strategic decisions on the re-opening of Europe’s abandoned mines could be supported by data that cannot currently be obtained by any other way, without major costs.
The Kaatiala mine is just one of four sites where the robots will be tested. The team are expected to move onto the Idrija mine in Slovenia later this year, followed by the Urgeiriça mine in Portugal (early-2019) and the Ecton mine in the UK (mid-2019). At Ecton, the robot will resurvey flooded mine floors that nobody has seen for more than 150 years.
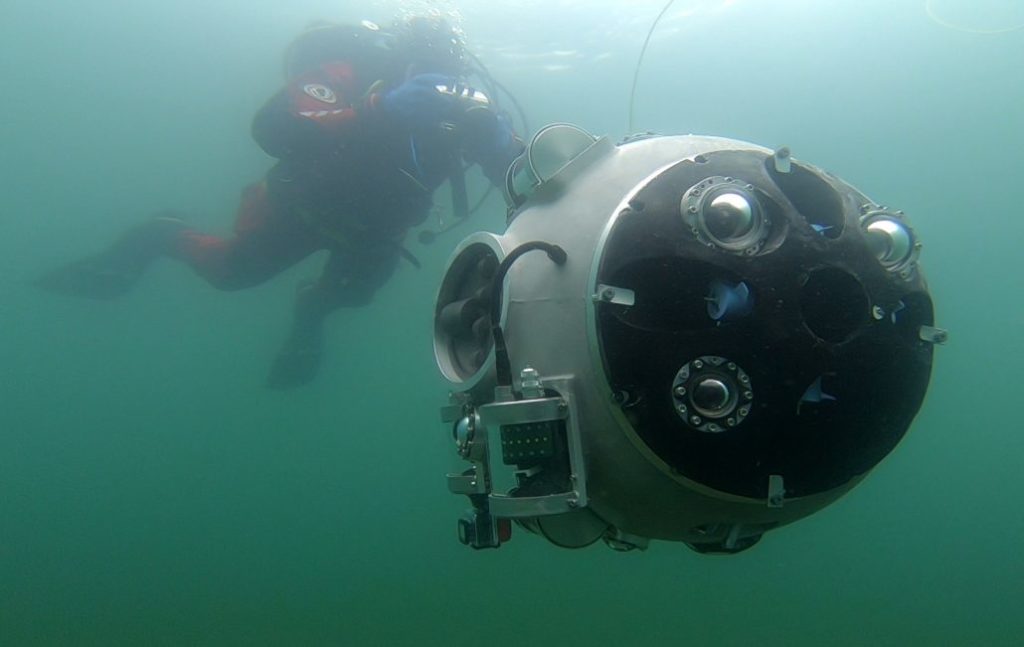
During the second week of trials at Kaatiala, in June, multiple dives were carried out with the robot (see photo), where UX-1 entered and successfully navigated the underground tunnels.
“Divers previously placed calibration objects in the tunnels to help with testing UX-1 capabilities: navigation, movement, control, mapping, amongst others,” UNEXMIN’s Communications Manager Luis Lopes said.
The tests allowed the UNEXMIN team to test different navigation sensors such as UV and SLS imaging units, multispectral and acoustic cameras, and laser scanners.
“These instruments are essential to gather spatial and geoscientific data,” Lopes said.
“The success of the Kaatiala trials is evident,” he said. “The UNEXMIN team is confident in further developing [and optimising] the technology…and that is the next step in the robotic platform development: to use the data acquired from this trial and improve the robot’s capabilities for the next trial at the Idrija mercury mine in Slovenia, in September.”
Once put together, the multi-robot platform will represent a new technology line only made possible by recent developments in autonomy research, allowing the development of a completely new class of mine explorer service robots, capable of operating without remote control. Such robots do not exist nowadays and UX-1 will be the first of its kind.