










Development of a legal framework and emergence of new safety requirements at industrial facilities is translating into the need to introduce new information technologies capable of minimising the number of hazards and emergencies, writes Alexey Klebanov*.
Analysis of accident statistics for surface mining operations shows that incidents involving collisions of heavy equipment, running over light vehicles and personnel are the most common type of accident, posing a serious threat to human life and health. Such accidents are primarily caused by poor visibility from the operator’s cabin. The table below shows the most common accident scenarios:
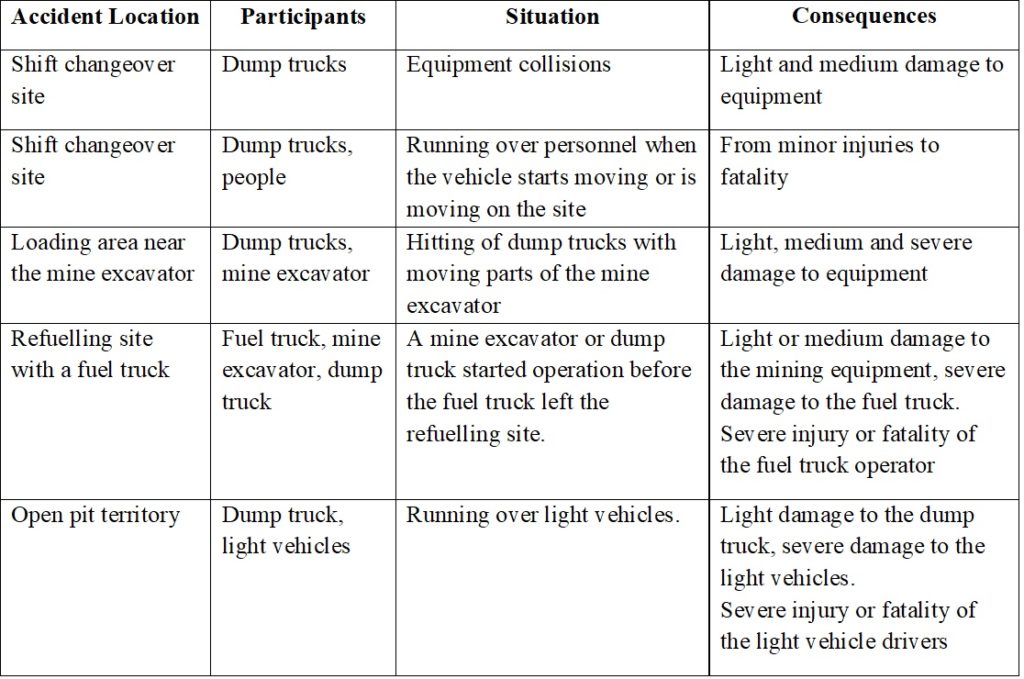
The low manoeuvring speed of heavy mining equipment produces the illusion of safety, while the design features of this equipment create blind spots where the operator is not able to see the surrounding objects.
Collisions of mining equipment with light vehicles causes disastrous effects not only to people’s lives and health, but also on the operational capability of the equipment. A single accident, even if it does not involve injuries, may halt the mining operations for a few days. Costs of repairs, equipment downtime, administrative penalties and loss of production – all of this has a significant negative impact on the efficiency of mining operations.
Let us have a closer look at some of the actual cases described above:
1) The dump truck operator was moving along a service road and failed to see the car of a company’s employee in time and ran over its right side making it almost completely flat (Figure 1). The employee in the car was able to bend down to the passenger seat, which saved his life.
2) Approximately an hour after shift start, a KAMAZ 43118 fuel truck arrived to the refuelling site, and its driver started refuelling a Komatsu PC 2000-8 excavator. The excavator driver did not make sure that there were no people in the hazardous area of the working excavator and thought that the truck nearby had finished refuelling and left. A backhoe operator started turning the boom towards the open-pit bench, caught the truck with the excavator body and tipped it over (Figure 2). The KAMAZ driver was pressed against the ground by the truck cabin.


Statistical data on the largest Russian surface mining companies for 2003-2018 shows that 24% of accidents with mining equipment are related to the units moving or operating when people are in the immediate vicinity. This includes 14% of cases with people being in the driver’s (operator’s) blind zone, and 12% of accidents related to reverse movement of the units or movements of their back sides. One-fifth of all these accidents, based on the investigation results, could have been prevented by an external observer who would see the whole picture from the outside.
Currently, administrative barriers such as restricted access areas for people and light equipment, strict manoeuvre regulations and sound alarms when reversing are virtually the only way to protect against collisions. However, statistics show that these measures are not sufficient and do not provide adequate security.
The task of minimising the number of such accidents can be met by using dedicated hardware and software systems that can expand the operator’s visibility without distracting him from his production tasks or overloading him with excessive visual information. Thus, the collision avoidance system for mining equipment should take up most of the information load and should provide the operator with a minimum set of data on the number, type, location and hazard level of static and moving objects located in the working area of a dump truck or excavator. The system has to perform prioritising and ranking of both the current hazard level of the situation based on the distance to the objects, and the intensity of alerting the operator of a possible collision by means of sound and visual alarms while minimising false alarms.
Preventive accident control measures are currently being implemented at foreign mining operations. These vehicle interaction defensive controls can be divided into the following levels (according to The Earth Moving Equipment Safety Round Table (EMESRT)):
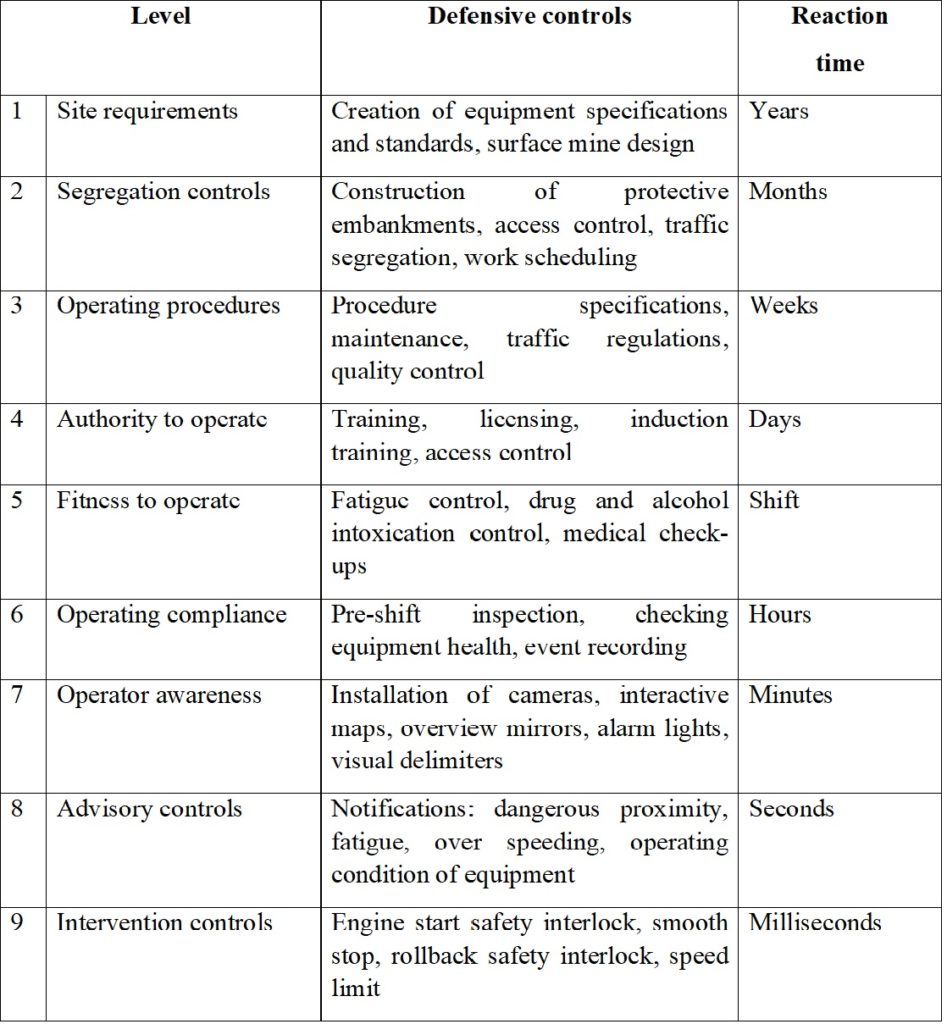
Collision Warning Systems belong to Level 8 (advisory controls) of preventive accident control measures and are the first level for implementation of a more general class of Collision Avoidance System (CAS), which, in addition to the warning functions, provide the possibility of emergency stop of the vehicle in order to prevent an accident (Level 9 of preventive accident control measures). As the emergency stop function requires intervention in the vehicle design or control information channels to operate the actuation mechanisms, the development of such systems requires direct cooperation with the mining equipment manufacturers.
It should be noted that already for a few years the legislation of the Russian Federation demands that underground mining equipment must be provided with collision warning systems. Order of Rostechnadzor No.599 of 11.12.2013 states: “Transport vehicles operating in mineral mines should be equipped with collision warning systems. The collision warning system shall provide the driver with timely notification if people and vehicles are present within a certain radius along the unit path.”
Currently, the law does not require the surface mining equipment to be fitted with collision warning systems, however, the current trends in improving industrial safety indicate that such requirements may be introduced in a few years to come. Thus, discussions are already underway in the professional community to provide mining equipment in opencast mines with collision warning systems.
Let us consider the technologies that are currently used in collision warning systems. There are two main scenarios for collision warning ie Vehicle-to-Vehicle (V2V) and Vehicle-to-Person (V2P).
Depending on the scenario, as well as the operating conditions, several technologies are used to design collision warning systems that employ such devices as LiDARs, radars, video cameras or radio communications. The systems available in the market have different prices, working range and are designed for different operating conditions. The main technologies used in collision warning systems include:
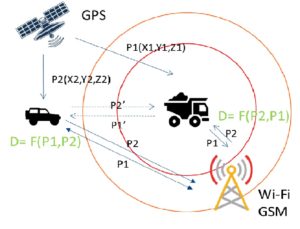
Global Navigation Satellite System (GNSS): a satellite navigation system, which is a more accurate analogue of GPS. High accuracy is achieved by using a ground station which coordinates are constant and do not change. The station serves to correct the measurement error of GPS-trackers on vehicles or carried personnel tags. This method can be used in both scenarios, ie V2V and V2P and is intended for surface mining only.
Advantages:
- Easy to implement as an extension to functionality of dispatching system for surface mining operations; and
- Allows to add functional features, eg location of objects on the map, control of proximity to hazardous areas, etc.
Disadvantages:
- Not applicable for underground mining operations and enclosed spaces;
- Requires a stable GPS signal;
- Depends on the data communication system between the machines and/or the server; and
- Requires 100% coverage.
Surrounding Radar Scanning Systems: These systems employ radars and LiDARs. This technology is intended for operation in the line of sight area and is used in the V2V scenario. It can be used both for underground and surface mining.
Advantages:
- Fully autonomous operation of each mobile unit;
- Ability to detect obstacles and lack of roads;
- Ability to combine information from radars and cameras; and
- Can be used as a system to prevent collision with obstacles.
Disadvantages:
- Operation is possible only in the near zone;
- High cost; and
- Is applicable to the V2V scenarios only.
An example of such systems is the Hexagon HxGN MineProtect (CAS) solution that offers 360° proximity detection when traveling at any speed and in all conditions, providing the information on a cabin display. The proximity detection system uses the radar technology to assess the position and movement of potential hazards, using risk-based algorithms to distinguish between safe objects and objects that may pose a collision threat. The situational awareness is further enhanced by calculating the speed and path using the GPS data.
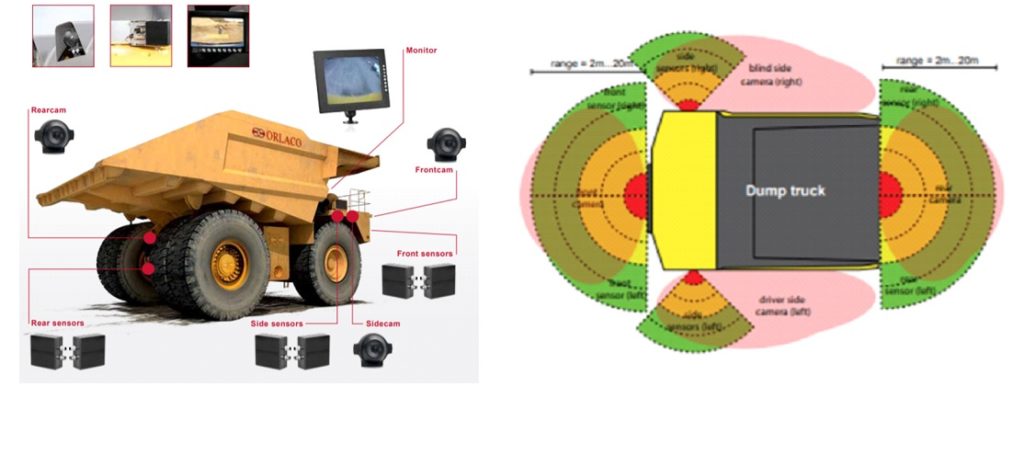
Camera-based systems: As a rule, camera-based systems are used as a supplement to radars or any other technology, because they are highly susceptible to environmental conditions (lighting, fog, contamination of optics, etc) and do not provide sufficient reliability for autonomous application. It can be used both for underground and surface mining.
Radio frequency systems: The UWB (Ultra-Wide Band) and UHF (Ultra High Frequency) bands are generally used. This technology is intended for application in the V2V and V2P scenarios. Its operation is based on the exchange of data messages between all the objects equipped with this system within the line of sight with the possibility of terrain following. The distance is defined by measuring the time a signal passes between several sources with application of the trilateration method. This system is applicable in all scenarios and for any mining method.
Advantages:
- Direct interaction between the mobile equipment and carried devices for personnel;
- Possibility to use in surface and underground mining as well as inside buildings;
- High accuracy; and
- Working distance of up to 70-250 m (depending on conditions).
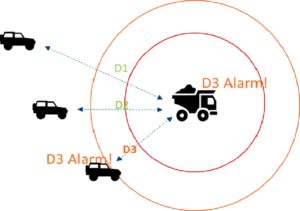
The RealTrac Collision Avoidance System is a good illustration of this technology. Monitoring is carried out in a horizontal plane within 360° at distances from one to 100 m. The system uses UHF to detect presence of mobile equipment or people behind obstacles or corners, as well as the Bluetooth Low Energy (BLE) technology to check if the operator is in the cabin to avoid false triggering. Proximity detection is performed autonomously both in driving and when the mobile equipment is parked. The system virtually divides the space around the vehicle into three zones:

Attention Zone where people are warned about the presence of equipment within a short distance. It is used to detect a potentially dangerous proximity and helps to alert people of an approaching asset.
Danger Zone identifies a dangerous proximity and alerts people. It serves to warn of a possible accident.
Emergency Zone triggers an alarm signal in an emergency situation or if an extremely dangerous proximity is detected.
As a rule, such systems include the following components:
- Radio modules placed all around the mobile unit and designed to detect on-board modules of other vehicles and personal tags;
- An indicator or a monitor, which is installed inside the vehicle to provide visual alerts of hazardous proximity;
- An on-board computer that calculates the direction and distance to other objects; and
- A personal tag, which is a piece of carried hardware designed to detect dangerous proximity between the person and mobile mining equipment.
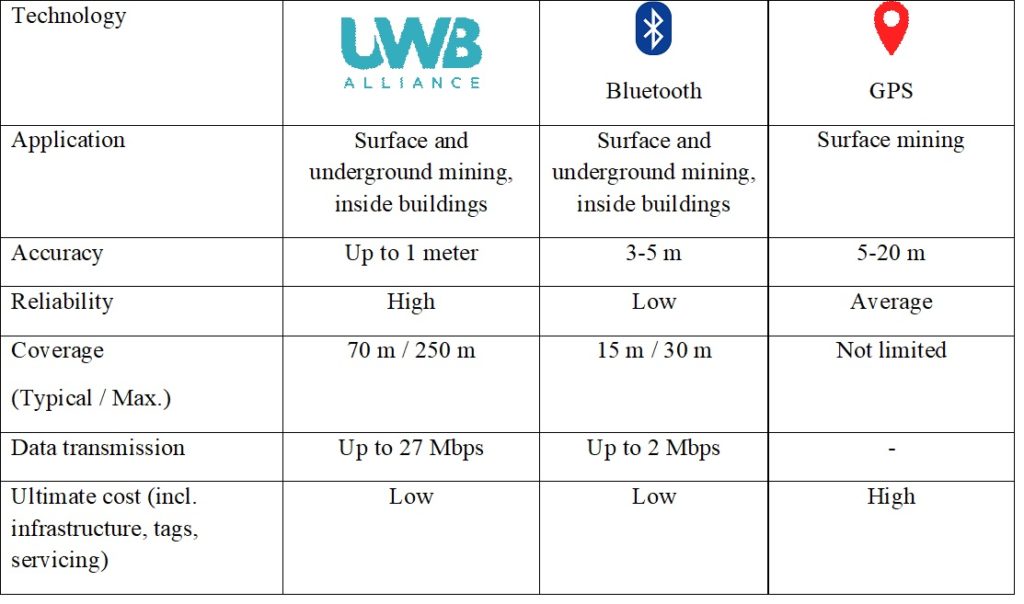
A general comparison of the most common technologies that use radio frequencies is provided in the Table:
All the described technologies have their advantages and shortcomings, so a combination of solutions should be used when the situation requires enhanced reliability:
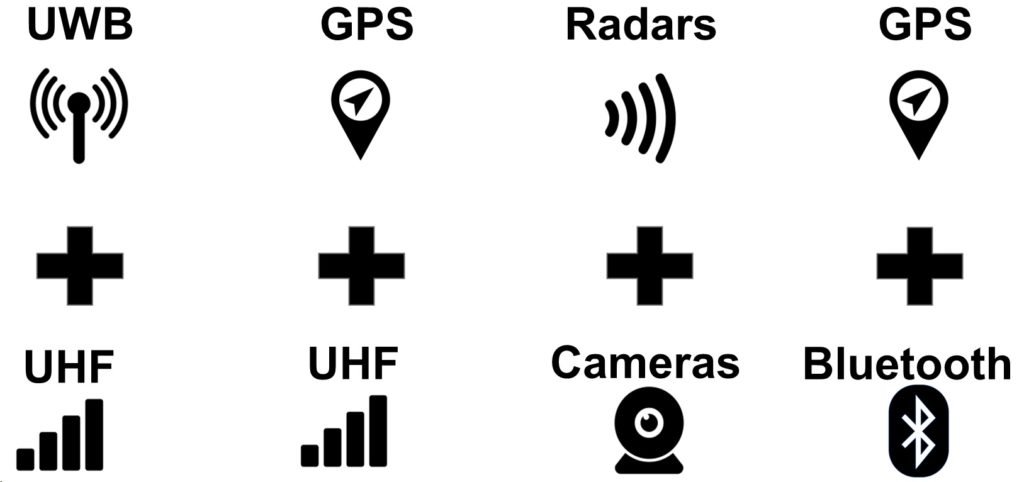
For the operations that employ a dispatching system, eg the OpenMine Mine Fleet Management System (VIST Group JSC) based on the satellite navigation system, one of the efficient combinations is UWB + GPS, which offers a number of advantages:
- Low equipment cost (through the use of available infrastructure);
- High accuracy and range of detection, operation in any weather conditions; and
- Radio frequency range that does not require licensing.
In addition to the dangerous proximity to mining equipment, miners’ lives and health are threatened if they are present in areas of potential rock falls and slides, collapsing walls and other hazards. Automation of operating supervision and warning if personnel enters such zones is directly related to accident prevention tasks.
Such monitoring and prevention of hazardous situations asks for a new role in the company, ie the industrial safety manager, who would provide a ‘second pair of eyes’ without being distracted by the actual production operations. The manager’s location in the mine fleet control room will allow to consolidate all the emerging incident warnings to create a real-time overview of the company’s industrial safety.
Monitoring of dangerous health conditions of employees at work completes the supervisory control. A number of such conditions may not be recognised by the employee, and it is, therefore, important that they are promptly identified and addressed through urgent medical assistance.
All the tasks above are successfully solved using personal wearable electronic devices. If the health checks are included, such a device can take the form of a biometric hand bracelet with the following functionality:
- Site positioning;
- Control of entering pre-defined hazard zones;
- Monitoring of heart rate variations, blood saturation;
- Detection of sudden height changes (falls);
- Detection of long periods without movement;
- Personal identification when detected by mining equipment;
- Urgent call to the dispatcher;
- Backup emergency communication channel with the dispatcher; and
- Immediate reporting to the control system.
Based on the above, it is possible to formulate the general technical requirements for a collision avoidance system:
- The system components should be installed on all types of mining equipment, making installation and removal as easy as possible. The maximum installation time for one vehicle must not exceed four hours (for a 130-220 t mining dump truck with a team of two technicians).
- The system shall provide the following operating modes:
– V2V proximity detection; and
– V2P proximity detection. - The system should ensure real-time proximity detection within the range of 360° and the horizontal distance of at least 100 m.
- The proximity detection is to be performed at the speeds of up to 60 km/h.
- The system needs to differentiate the hazard zones depending on the distance and colour-code these zones on the indicators. The size of the zones can be dynamic and depend on the speed and direction of the moving object.
- Different ways (sources) of alerting shall be implemented for each zone on the operator display or the personal tag depending on the hazard level.
- The system has to minimise the number of false alarms.
- It needs to be scalable, have a high upgrade potential and allow for integration with dispatching systems.
Selection of a collision avoidance system should rely not only on the current tasks to ensure a specified safety level in the operation, but also on the needs of industrial process management in the company.
Some systems also provide location data for vehicles and people, and can be integrated with the driver fatigue control systems. All the collected information can be used in combination with the permit-to-work system, which may become the first step towards implementation of the Multifunctional Safety System within the operation, which should generally provide for:
- Control of the current state of the surface mining operations against the design solutions and the mine development schedule;
- Control of operation of the main mining and transport equipment;
- Monitoring of geomechanical and seismic processes;
- Warning and location systems for mobile equipment and personnel;
- Communication functions, including those with professional emergency response teams; and
- Availability of other safety systems (subsystems) whic account for the specific features of a particular operation.
*Alexey Klebanov is Science Director at Zyfra Group