










Digital Innovation: The Future Of Underground Mining Is Autonomous
Autonomous Robots Drive Safety And Efficiency Underground
Over the course of the past decade, autonomous aerial robots and other unmanned robotic vehicles have become an indispensable tool in surveying and monitoring underground environments like mining tunnels and drifts, especially in post-blast scenarios and in older workings being reconsidered for use. These autonomous systems have taken on many jobs underground such as a driverless loader from Sandvik that can be pre-programmed or piloted from the surface, mapping small tunnels and drifts using a semi-autonomous Spot from Boston Dynamics, or even autonomously exploring and mapping large, unknown cavities using the Autonomy Level 4-powered ExynAero from Exyn Technologies.
Traditionally, the task of inspecting and assessing the safety of these underground cavities and structures was carried out by human workers. This involved physically entering the tunnels, drifts and near the brow of open stopes with surveying equipment, often in hazardous conditions, to visually inspect the area and identify any potential risks. This method was not only time-consuming and labour-intensive but also posed significant safety risks to the workers involved and could often result in an incomplete map of the area of interest requiring costly rework.

Today, equipped with advanced sensors and AI, autonomous vehicles can quickly and accurately survey complex, dynamic environments while capturing high fidelity data sets to be used for volumetric analysis or other comparative studies. This allows for faster decision-making and more proactive management of safety risks.
Autonomous robots are capable of intelligently navigating and mapping unknown environments by using a complex algorithm called Simultaneous Localisation And Mapping, or SLAM. It’s a computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of the robot’s location within it.
SLAM allows autonomous robots to explore, navigate, and understand unknown environments without the need for pre-existing maps or GPS. In the context of underground environments like mines or tunnels, SLAM can enable autonomous robots to navigate and map these complex, dynamic and potentially hazardous spaces, improving safety and efficiency for survey teams responsible for capturing accurate maps of ongoing operations.
And the power of SLAM doesn’t stop once the robot lands. While not in flight, those computational resources can be used to correct any errors accumulated in the point cloud map and georeference it to a known coordinate frame for global accuracy. Most importantly, this post processing can be done by the survey team while on-site right after an autonomous mission, ensuring that an accurate, complete point cloud is captured before moving onto the next area of interest.
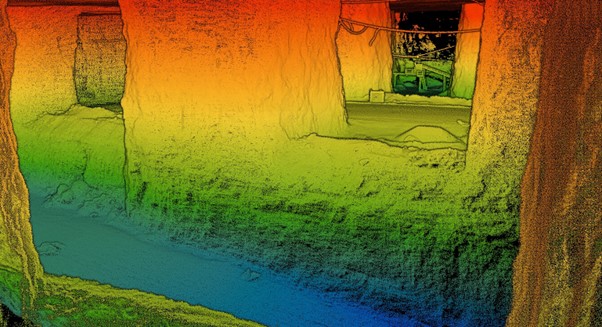
Fast and accurate mapping of working underground environments are crucial for understanding when remedial work is needed to reinforce and stabilise mine structures to ensure their safety and longevity. By repeatedly scanning the same areas underground, survey teams can monitor tunnels and drifts for any changes in the shape or size, such as bulging walls or narrowing passages, which could indicate instability, or look for potential cracks or signs of damage.
By comparing point clouds taken over time, changes in the mine structure can be identified. This can help to detect slow-moving trends which can’t be spotted in a single snapshot, such as gradual deformation of the mine walls or roof. This information can be used to predict when and where remedial work, such as bolting or shotcreting, might be needed.
Moreover, the high-resolution data provided by autonomous mapping systems can also be used to guide the remedial work. For example, it can help to determine the most effective locations for rock bolts, or the areas where shotcreting is most needed. They can also be used to measure the distance to the mine roof, which can be useful for planning equipment placement or extraction operations. They can also detect obstacles or hazards, such as fallen rocks, to help ensure the safety of workers.
Autonomous robots can provide a wealth of valuable data that can help to maintain the safety and integrity of a mine. By detecting changes in the mine structure and providing detailed, high-resolution data, they can help to predict and guide remedial work, improving the efficiency and safety of mining operations. These autonomous and semi-autonomous systems will continue to drive safety and efficiency in underground mining while continually pushing towards the future goal of a fully autonomous mining operation.
Exyn & Sandvik – Autonomous Multi-Robot Collaboration for Underground Cavity Monitoring
Imagine a survey team with a suite of autonomous robots at their fingertips, commanding missions and evaluating high resolution point clouds all from the surface while maintaining peak situational awareness of all work happening underground.