Join us at The Electric Mine 2026
The Electric Mine 2026
Get IM Free
DOWNLOAD IM
Videos/Webinars
Interviews
Webinars
Videos
2025 Media Pack
Events
Pay Online
Contact
The Electric Mine 2026
Get IM Free
DOWNLOAD IM
Videos/Webinars
Interviews
Webinars
Videos
2025 Media Pack
Events
Pay Online
Contact
IM Magazine
IM Magazine Archives
Past Events
The Electric Mine | Perth 2024 photos
The Electric Mine | Tucson 2023 photos
The Electric Mine | Toronto 2019 photos
Event Papers
The Electric Mine 2023 Conference Papers and Videos
The Electric Mine 2022 Conference Papers
The Electric Mine Virtual Conference 2020 Papers
The Electric Mine 2019 Papers
Helpful Links
IM Magazine
IM Magazine Archives
Past Events
The Electric Mine | Perth 2024 photos
The Electric Mine | Tucson 2023 photos
The Electric Mine | Toronto 2019 photos
Event Papers
The Electric Mine 2023 Conference Papers and Videos
The Electric Mine 2022 Conference Papers
The Electric Mine Virtual Conference 2020 Papers
The Electric Mine 2019 Papers
Helpful Links
Filter by:
All Topics
Automation
Base metals
Bulk handling
Careers in mining
Coal technology
Comminution of minerals
Communications in mining
Diamond mining
Energy minerals
Environmental
Equipment maintenance
Explosives and blasting
Gem stone mining
General
High tech minerals
History of mining
HOF
Industrial minerals
IoT
Marine mining
Metallurgy
Mine operation news
Mine shafts and equipment
Mine surveying
Mine ventilation
Mineral commodities
Mineral exploration
Mineral processing
Mineral project development
Mining consumables
Mining equipment
Mining events
Mining finance
Mining industry recognition
Mining maintenance
Mining mergers and acquisitions
Mining people
Mining policy
Mining project news
Mining safety
Mining services
Mining software
Mining techniques
Power supply for mines
Precious metals
Spotlight Feature Article
Steel and iron ore
Sustainable mining
Uncategorised
Uncategorized
Undersea mining
Videos
Water management
04 Dec 2020
UP’s Vehicle Dynamics Group to boost UG mine safety with new testing facility
An engineering team at the University of Pretoria (UP) has pioneered an underground procedure which...
Read More
26 Nov 2020
Freespace Operations’ Callisto to soar higher in mining drone space
Victoria, Australia-based Freespace Operations has recently customised its drone technology to address some of the...
Read More
21 Sep 2020
Emesent builds mining connections as Hovermap autonomy takes off
Having recently helped DJI’s M300 drone fly autonomously underground (through its Hovermap Autonomy Level 2...
Read More
22 Jul 2020
Emesent’s Hovermap to provide Deswik with complete underground mine picture
Emesent has partnered with leading software developer Deswik to, it says, enable mining companies to...
Read More
10 Jan 2020
Oxbotica and Navtech working on radar-based automation solution for mines
Oxbotica and Navtech have announced the joint product development of a radar-based navigation and perception...
Read More
11 Nov 2019
Scania pictures the future of mine site haulage with AXL
In September, Scania joined Komatsu in announcing it had come up with a cabless automated...
Read More
06 Aug 2019
Why the Pilbara leads the way in haul truck automation
A presentation at last month’s AusIMM Iron Ore 2019 Conference, in Perth, Western Australia, made...
Read More
27 Jun 2019
BHP’s Jurgens presents big picture automation plan
Diane Jurgens, BHP’s Chief Technology Officer, used her time on stage at the Bank of...
Read More
27 Mar 2019
Clearpath survey robots receive value added LiDAR capability
Velodyne Lidar says the combination of its LiDAR sensor expertise with Clearpath Robotics’ mobile robots...
Read More
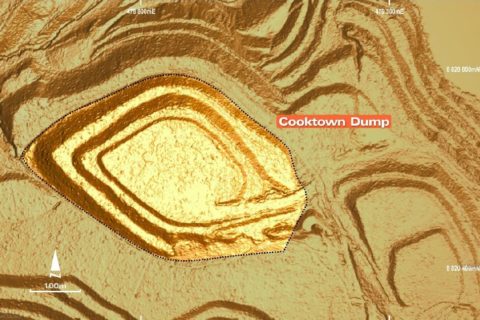
25 Mar 2019
LiDAR proves up potential new resource at Kingston’s Misima gold project
A recent LiDAR survey has confirmed the location of a large stockpile of mineralised material...
Read More
30 Jan 2019
Airobotics boosts autonomous drone offering with new LiDAR capabilities
Airobotics has introduced LiDAR capabilities to its lineup of automated drone solutions, significantly reducing the...
Read More
05 Nov 2018
CSIRO drone autonomy spin-out Emesent finds financial backing
Emesent, a drone autonomy spin-out from Australia’s CSIRO, has raised A$3.5 million ($2.5 million) in...
Read More
Prev
1
2
3
Next